АВТОНОМНЫЙ НАСТРОЙЩИК ПИД-РЕГУЛЯТОРОВ (АНП-1)
1. Назначение
При изменении режима технологического процесса часто необходимо изменять
(настраивать) параметры ПИД-регулятора (коэффициент его усиления
 , постоянные интегрирования
, постоянные интегрирования
 и
дифференцирования
и
дифференцирования
 ),
для того чтобы сохранить точность и качество регулирования технологического
процесса.
),
для того чтобы сохранить точность и качество регулирования технологического
процесса.
Настройка параметров регулятора осуществляется человеком-оператором технологического процесса либо средствами самонастройки ПИД-регулятора. Если технологический процесс протекает в условиях интенсивных внешних возмущений, то действия оператора, а также существующие средства самонастройки малоэффективны.
Автономный настройщик ПИД-регуляторов АНП-1 предназначен для настройки ПИД-регуляторов при изменении режима технологического процесса, протекающего при интенсивных внешних возмущениях.
2. Описание
2.1. Структурная схема подключения
Настройщик реализован на промышленном контроллере. Схема его подключения приведена на рис. 1.
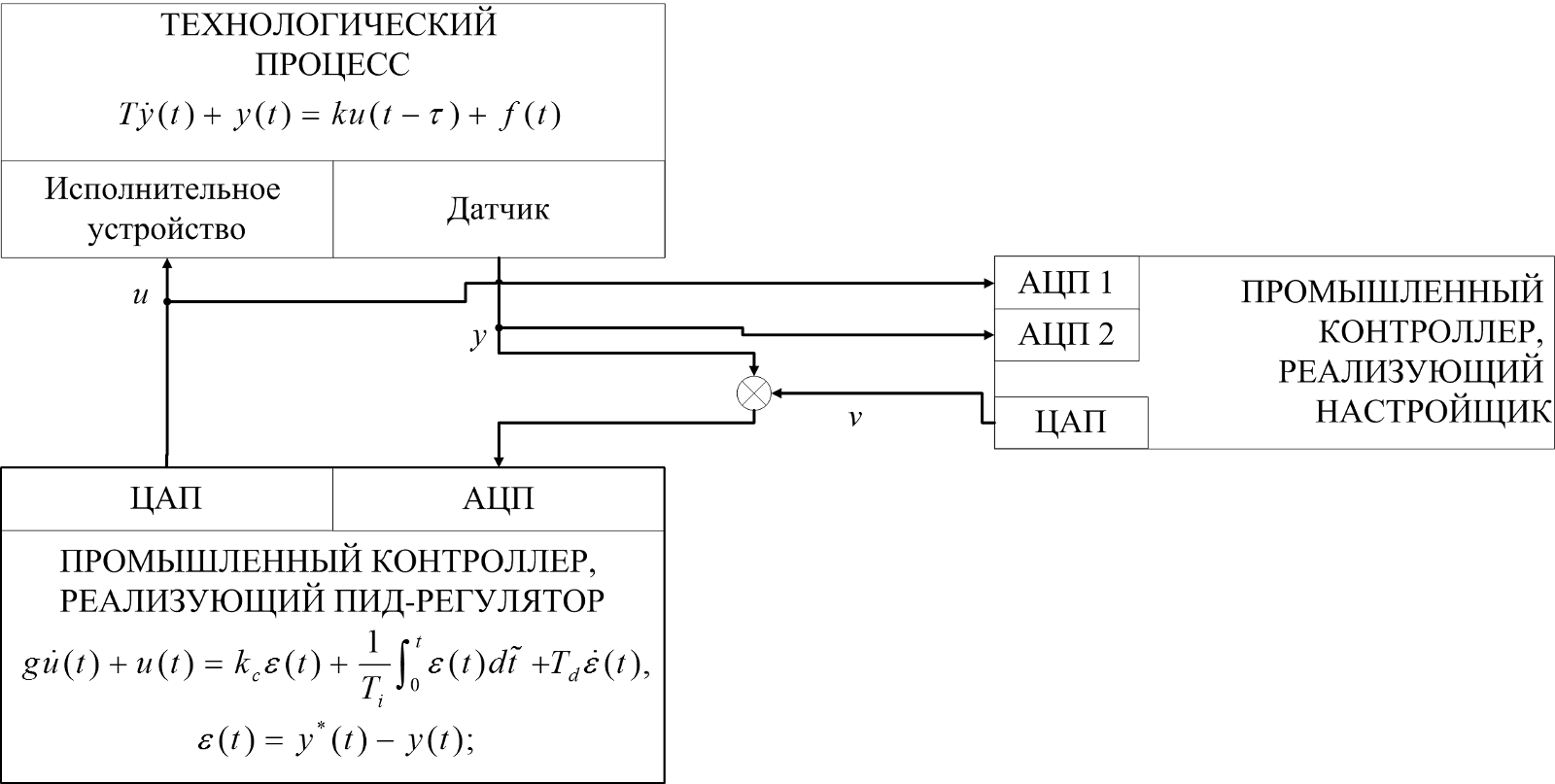
Рис. 1. Схема подключения настройщика
На его входы поступают сигнал со входа
 и выхода
и выхода
 регулятора. Выход настройщика, называемый испытательным сигналом
регулятора. Выход настройщика, называемый испытательным сигналом
 поступает на вход регулятора вместе с задающим воздействием («уставкой»
поступает на вход регулятора вместе с задающим воздействием («уставкой»
 ).
Испытательный сигнал настраивается так, чтобы отклонение от уставки составляло
заданную малую часть отклонения, вызванного внешним возмущением.
).
Испытательный сигнал настраивается так, чтобы отклонение от уставки составляло
заданную малую часть отклонения, вызванного внешним возмущением.
2.2. Режимы работы
Первый режим (идентификационный)
Результатом этого режима работы
настройщика являются коэффициенты объекта первого порядка с запаздыванием:
 — коэффициент передачи,
— коэффициент передачи,
 — постоянная времени,
— постоянная времени,
 — запаздывание. Используя эти числа человек-оператор определяет параметры
ПИД-регулятора на основе принятых для данного технологического процесса
рекомендаций.
— запаздывание. Используя эти числа человек-оператор определяет параметры
ПИД-регулятора на основе принятых для данного технологического процесса
рекомендаций.
Второй режим (самонастройка)
На основе идентифицированных
коэффициентов объекта настройщик вычисляет параметры ПИД-регулятора в
соответствии с принятыми для данного технологического процесса рекомендациями и
сообщает человеку-оператору параметры
,
и
,
который вводит их в контроллер, управляющий технологическим процессом. Другой
путь передачи параметров
,
и
состоит
в использовании SCADA-систем.
Третий режим
Отличается от второго тем, что настройщик синтезирует ПИД-регулятор и находит числа,
и
,
используя, заложенный в настройщике, метод синтеза. Этот синтез осуществляется
исходя из заданных требований к точности и качеству регулирования
(быстродействию, перерегулированию и запасам устойчивости).
3. Результаты исследования настройщика АНП-1
Настройщик реализован на промышленном контроллере WinPAC-8441.
Для экспериментального исследования работы программного обеспечения настройщика был разработан специальный стенд полунатурных испытаний.
Стенд состоит из двух контроллеров ПЛК ОВЕН-150 и промышленного контроллера WinPAC-8441. В контроллерах ОВЕН имитируется технологический процесс. На одном контроллере содержится имитатор объекта управления, в который заложена возможность периодической смены коэффициентов объекта. На втором контроллере работает ПИД-регулятор, который управляет объектом. Настройщик связан с технологическим процессом только посредством электрических сигналов. На рис. 2 приведена схема стенда полунатурных испытаний.
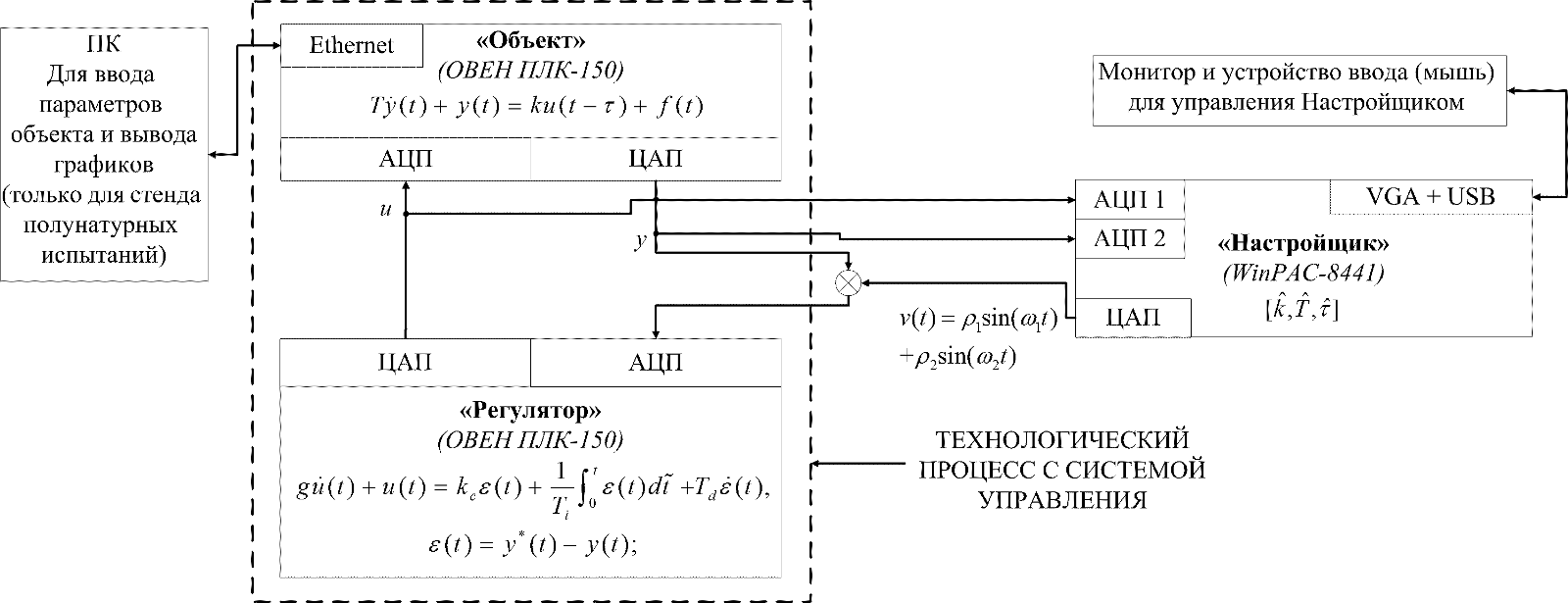
Рис. 2. Схема стенда для экспериментальных исследований настройщика
В качестве ПИД-регулятора использовался стандартный функциональный блок, поставляемый вместе со средой разработки.
В эксперименте на начальном режиме
работы объекта были заложены следующие параметры объекта управления:

Внешнее возмущение принято одинаковым на протяжении всего эксперимента и равно
 .
Величина уставки в эксперименте была постоянной и равна
.
Величина уставки в эксперименте была постоянной и равна
 .
.
Для указанных параметров объекта были рассчитаны коэффициенты регулятора
 .
.
Затем была произведена смена параметров объекта, их значения стали соответственно:
 Настройщик произвёл идентификацию параметров объекта управления, на его выходе были
получены следующие значения оценок параметров
Настройщик произвёл идентификацию параметров объекта управления, на его выходе были
получены следующие значения оценок параметров
 При идентификации испытательный сигнал имел вид:
При идентификации испытательный сигнал имел вид:

По оценкам, найденным настройщиком, были рассчитаны новые коэффициенты регулятора
 .
.
На рис. 3 изображен выход объекта на нулевом режиме, когда коэффициенты объекта равны
 ,
а коэффициенты регулятора, настроенные на этот объект, равны соответственно
,
а коэффициенты регулятора, настроенные на этот объект, равны соответственно
 .
.
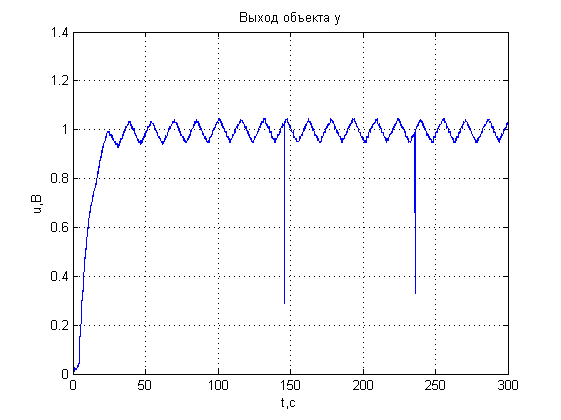
Рис. 3. Объект в начальном режиме, регулятор настроен правильно
На рис. 4 изображены выход объекта после смены его режима, когда коэффициенты объекта равны
 ,
а коэффициенты регулятора остались без изменений и равны
.
,
а коэффициенты регулятора остались без изменений и равны
.
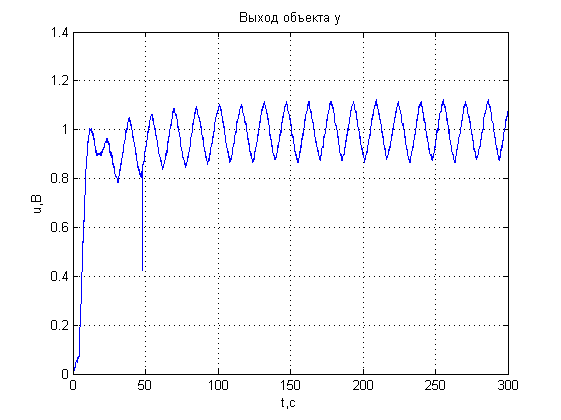
Рис. 4. Объект в первом режиме, регулятор нулевого режима
На рис. 5 изображен выход объекта в течение работы настройщика.
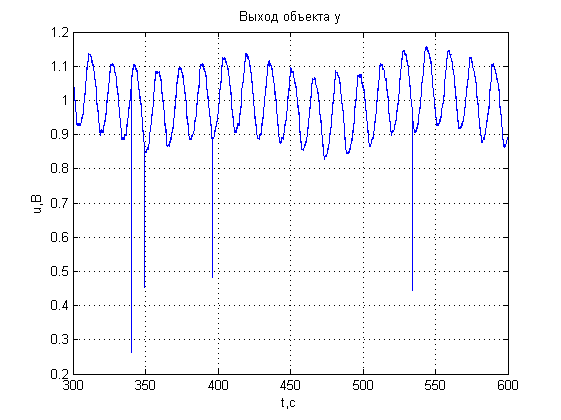
Рис. 5. Работа настройщика
На рис. 6 изображен выход объекта, когда его коэффициенты равны
,
а коэффициенты регулятора равны
.
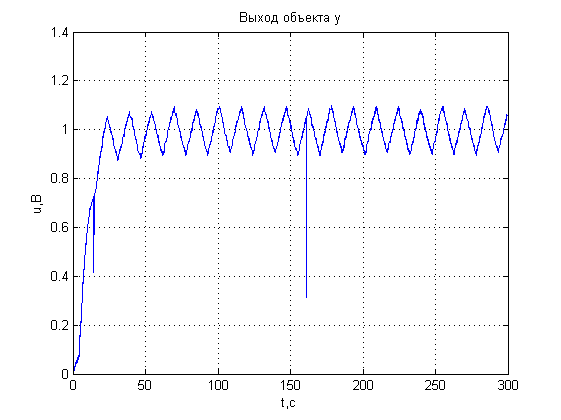
Рис. 6. Объект в первом режиме, регулятор настроен по найденным значениям коэффициентов объекта