Adaptive precise controller CHAR-PID-2S for controllers SIEMENS
1. Problem to be resolved by the controller CHAR-PID-2S
The controllers Siemens S7 are widespread type of controllers. The Siemens PID Self-tuner is the tools for automatic tuning of PID-controller developed by SIEMENS. [1]. The substantial disadvantage of this controller is the requirements of a “small” external disturbance applied to the plant.| The requirements to the process for the tool Siemens PID Self-tuner: | Advantages of CHAR-PID-2S: |
|---|---|
| The process should have the asymptotic time response with the steady time of delay/ This requirements excludes the processes with the oscillate time response and astatic processes. | The process may have the stable oscillate characteristic. The astatic processes are allowed. |
| The comparative small values of time delay | The time delay is up to 50% of maximal time constant |
| The small disturbances in the heat processes. The adequate quality of measured signals in the sense of sufficiently large coefficient “signal-noise” | The large external disturbance effected to the process are allowed |
2. The experimental investigation in the presence of external disturbance
The model of the controlled plant is described in the article
[1].
The external disturbance that interfered to the mode l is the negative impulse:
is the negative impulse:

The plots of control process are shown below.
2.1. Siemens PID Self-tuner under external disturbance
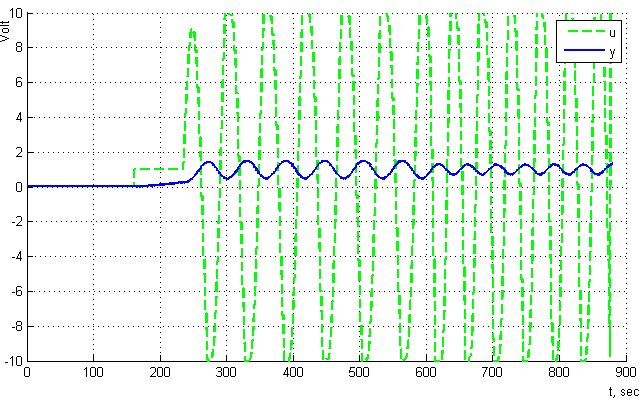
The algorithm of PID Self-tuner doesn’t handle the external disturbance, the system is unstable after self-tuning of controller, the self-oscillation rise because of the natural constraints to the inputs and outputs of the plant (DA and AD converters) .
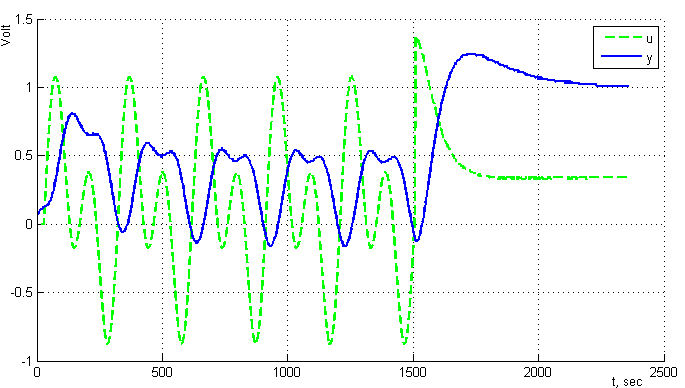
2.2. CHAR-PID-ЧАР-2S under external disturbance
The algorithm of CHAR-PID-ЧАР-2S successfully tuned the controller for the plant in the presence of the same external disturbance f(t); the system is stable. The plots of control processes: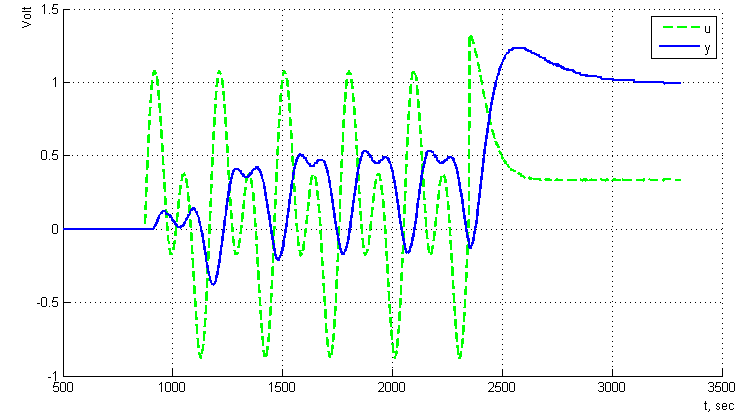
3. Conclusions
Adaptive controller CHAR-PID-2S for industrial PLC Siemens S7-313C allows to extend area of application of this PLC due to fact that this controller is workable under large external disturbance. The results of experiences show its effectiveness.
REFERENSES
[1] Pfeiffer B.-M. Towards ‘plug and control’: self-tuning temperature controller for PLC // International Journal of Adaptive Control and Signal Processing. - 2000. - Vol. 14, no. 5. - P. 519-532.Appendix. Algorithm of Siemens PID Self-tuner
Steps of algorithm of automatic tuning are shown on fig.1
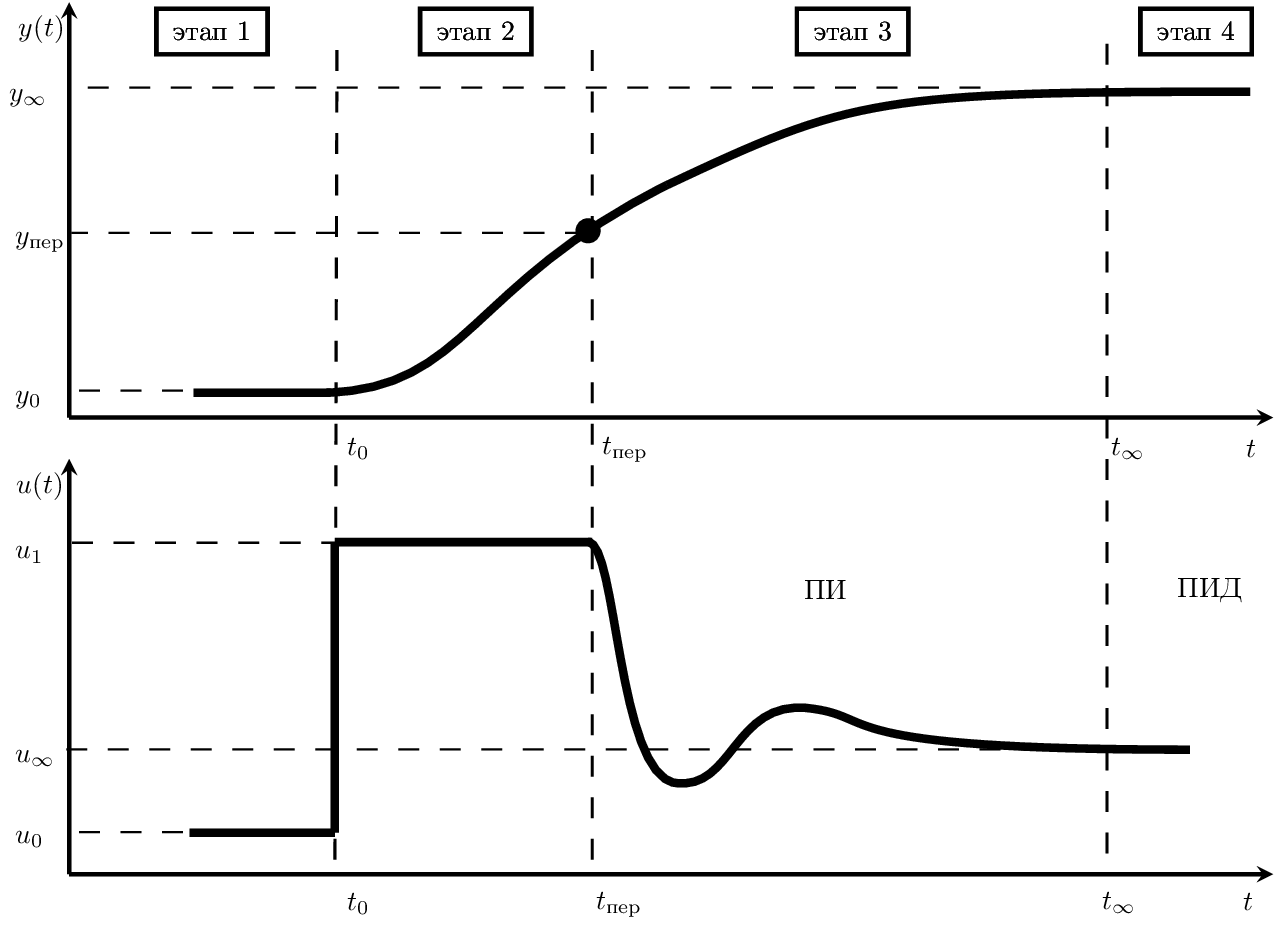
Process of tuning consists of four steps. On the first step, plant is controlled in manual mode (frequently, for example in the heating process, the plant is in “cold” state )
On the second step, the constant is applied to the input of the plant in the open-loop system.
The program of automatic tuning monitors the output of the plant
 and searches the point of inflextion (
and searches the point of inflextion ( ,
,
 ,
,
 ),
This is the moment when the step response reaches maximal slope.
),
This is the moment when the step response reaches maximal slope.
The experimental investigation without external disturbance
The program for controller was developed using IDE Siemens TIA Porta that allows to develop the program for lower level as well as the operator terminal (SCADA). The main part of the program is the interrupt function that executes all main calculations.
The program is realized as the one stream because the calculation formulae is simple
The program code is written using SCL language. The SCL is the extension of ST language for industrial controllers of standard IEC 1131.
The model of the plant is described in
[1]:

We tested the controllers for the case when the external disturbance was absent.
Siemens PID Self-tuner for the case when the external disturbance is absent
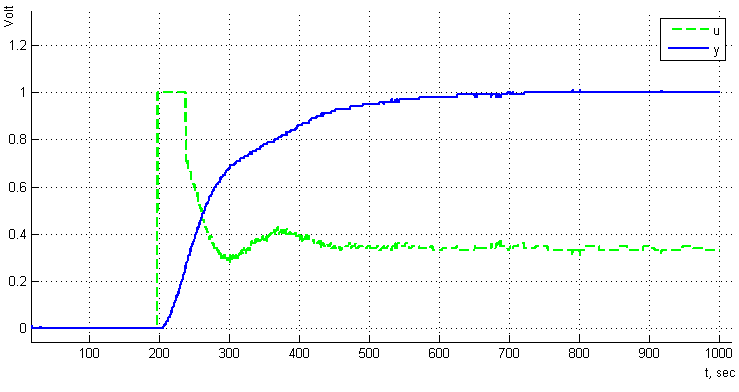
The system is stable after tuning.
CHAR-PID-2S for the case when the external disturbance is absent
The tuning has been successfully finished, the system is stable after tuning.