Adaptive precise controller CHAR-25
General information
Problem to be resolved by the controller
Industrial digital controllers are used to control complex dynamic plants (processes) in different real-life applications such as power engineering systems, natural gas and petroleum industry, nuclear technology etc. Each controller operates in accordance with some control algorithm, which is depended on control objectives, properties and parameters of the plant, system uncertainties and external disturbances. The control algorithm is realized in some programming language (C, ST, etc) supported by concrete electronic device(embedded system). The only special software allows the embedded system became the status of control device (controller). That is why the term controller is closely related to the software that implements some control algorithm into the embedded system. For example, the programmed embedded system that realize the Proportional–Integral–Derivative(PID) control algorithm is called PID-controller. The main performance index of the control system is declination (control error) of the plant output from the reference signal, for instance, reference temperature of heating system or reference generator voltage. So, in real-life systems control errors imply heat and electric losses. The control system parameters and dynamic properties of the plant vary with time due to changing of the operating modes. This implies large control errors. Therefore self-tuning control algorithms adaptive to changes of control system parameters need to be developed. The most of industrial controllers realize PID-algorithm. They are normally used to control a process with large time delays. Small delays allow to apply more complex algorithms, realized by output controllers, that provide higher control precision with respect to PID-controllers. Controllers that provide specified tolerance for the plant output after the adaptation process is ended further referred as precise controllers. Problem to be resolved by adaptive precise controller CHAR-25 is the increasing of control errors in course of controller operation. It allows to decrease the losses of warm, electrical energy and etc. during control process.
Innovation core
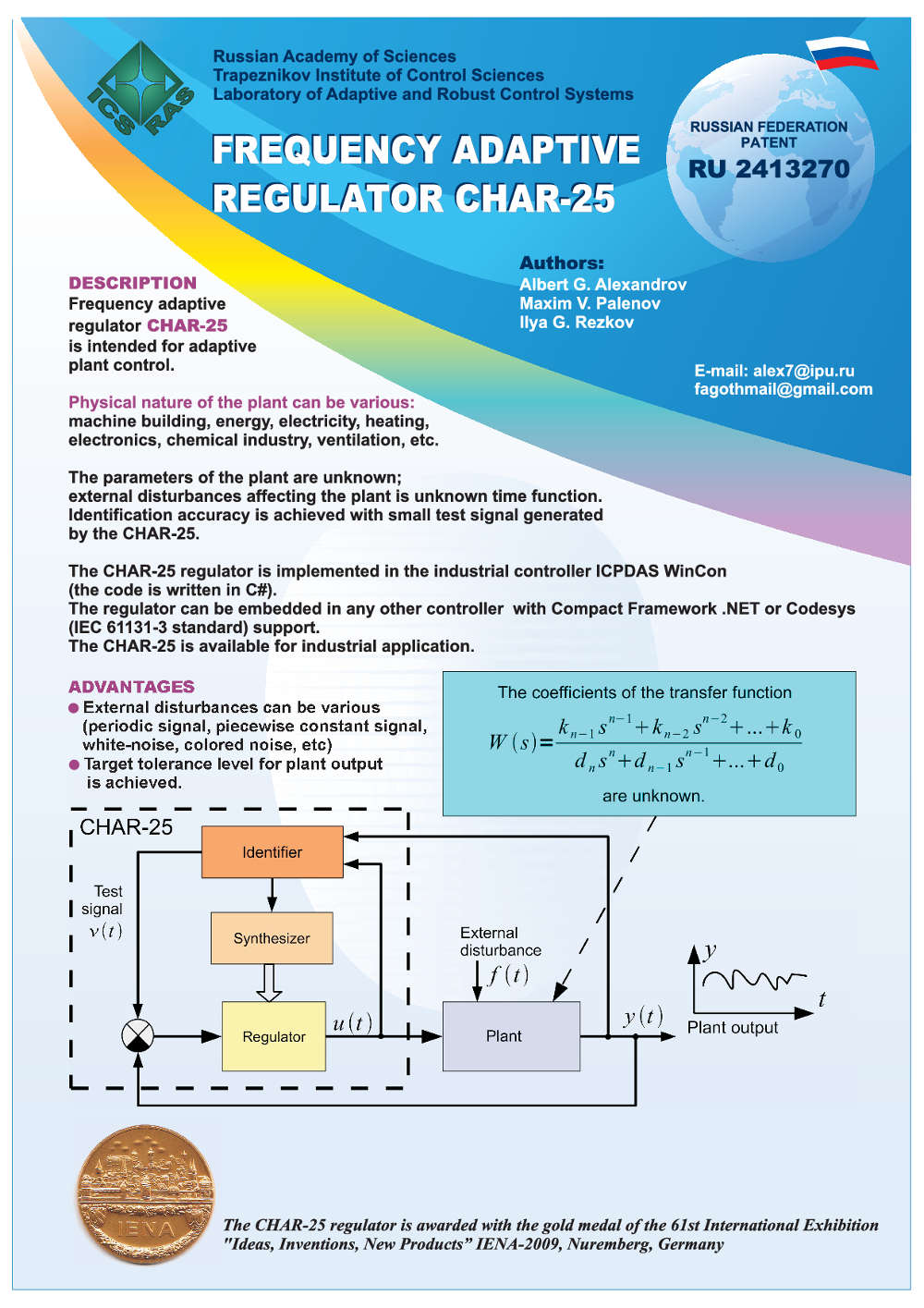
The adaptation process is based on plant identification and control synthesis. Identification of the plant parameters is complicated by variations of external loads (for example, fluctuations of ambient temperature of heating system or changing of power consumers), which are called by exogenous disturbances. These operation conditions require special control and identification algorithms. The proposed adaptive controllers are based on the new plant parameters identification method (finite-frequency identification) . The method uses harmonic test signal to reduce the influence of external disturbances on the identification result. The amplitude and the frequency of the test signal are self-tuned in such way that guarantees small variations of the plant output
Advantages
CHAR-25 controller does not have analogs. CHAR-25 is the first adaptive controller that provides the given control precision in the case of exogenous system disturbances. It has the following advantages: а) it does not require the knowing of the plant’s transfer function, so after controller connection it automatically adapts to plant parameters providing the given control precision; b) it automatically adapts to slow variations of plant parameters; c) adaptation process works properly in the case of external disturbances and uncertainties
Publications
- Резков И. Г. Адаптивный регулятор для многорежимного объекта // ж. "Автоматика и телемеханика", №5, 2013, стр. 35 - 58. (download)
- Александров А. Г. Частотная адаптивная система управления. Патент на изобретение № 2413270, Опубликовано: 27.02.2011 (download)
- Александров А.Г. , Д.Г.Кариков ЧАСТОТНЫЙ АДАПТИВНЫЙ РЕГУЛЯТОР ЧАР-21. Труды международной конференции "ИДЕНТИФИКАЦИЯ СИСТЕМ И ЗАДАЧИ УПРАВЛЕНИЯ",Москва,2006,ИПУ,CD-ROM,ISBN 5-201-14984-7,стр. 2361-2381. (download)
- Александров А.Г. , Д.Г.Кариков, Курицина Е.Ю. Частотный адаптивный регулятор с заданным интервалом дискретности. Труды международной конференции ИДЕНТИФИКАЦИЯ СИСТЕМ И ЗАДАЧИ УПРАВЛЕНИЯ",Москва,2007,ИПУ.CD-ROM,ISBN 5-201-14992-8,стр.655-668. (download)
- Аlexandrov A.G., D.Khomutov Frequency adaptive controller: experimental investigation Proceedings of the Tenth IASTED International Conference May 26-28, 2008 Quebec City, Quebec, Canada, ISBN 978-0-88986-746-8.pp. 96-101. (download)
- Александров А.Г. , Д.Г.Кариков , Д.А.Хомутов. Частотный адаптивный регулятор . Технические и программные средства систем управления, контроля и измерения, УКИ'08, Материалы Российской конференции с международным участием, Москва 2008. Труды, Москва, 2008, стр. 88-89. (download)