Адаптивный ПИД-регулятор ЧАР-ПИД-2S для контроллеров Siemens
1. Назначение ЧАР-ПИД-2S
Как известно, в мире достаточно широко распространены контроллеры Siemens серии S7. Для автонастройки ПИД-регулятора существует программное обеспечение Siemens PID Self-tuner [1]. Существенным недостатком данного регулятора является требование незначительного воздействия внешнего возмущения на объект.| Требования к процессу в программе настройки Siemens PID Self-tuner: | Достоинства ЧАР-ПИД-2S: |
|---|---|
| Процесс должен иметь асимптотическую переходную характеристику со стабильным временем запаздывания. Это требование исключает процессы с осциллирующей переходной характеристикой, а также астатические процессы | Процесс может иметь устойчивую осциллирующую характеристику. Допускаются астатические процессы |
| Относительно небольшие значения времени запаздывания (инерционность объекта плюс транспортное запаздывание) | Время запаздывания может доходить до 50% от наибольшей постоянной времени |
| Малые возмущения в температурных процессах. Адекватное качество измеряемых сигналов в смысле достаточно большого коэффициента сигнал-шум | Допускаются сильные возмущения, действующие на процесс |
2. Экспериментальное исследование с внешним возмущением
Модель объекта управления взята из статьи
[1].
В модель объекта вносится внешнее возмущение
 , имеющее вид отрицательного импульса:
, имеющее вид отрицательного импульса:

соответствующие графики процесса приведены ниже.
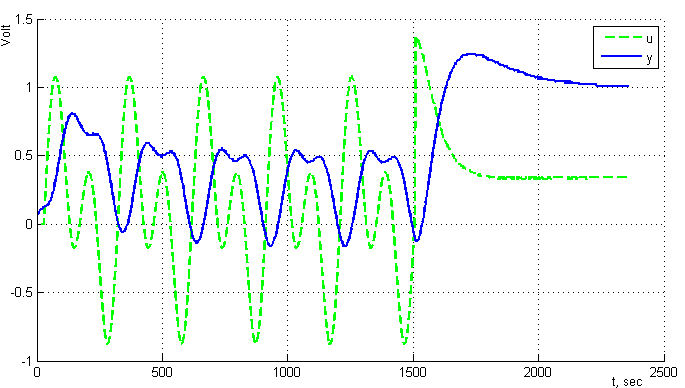
2.1. Siemens PID Self-tuner с внешним возмущением
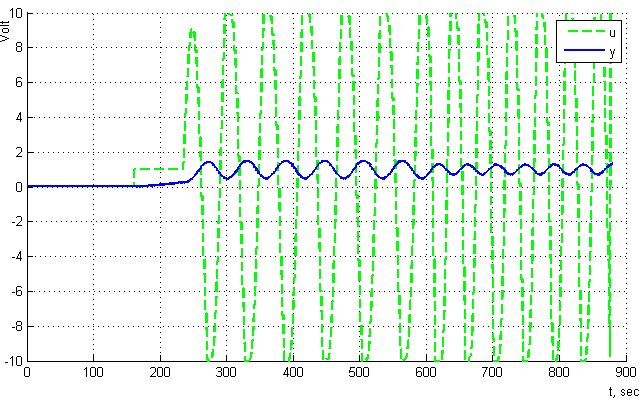
Алгоритм PID Self-tuner не справляется с действующим на объект внешним возмущением, система после настройки неустойчива и появляются автоколебания, обусловленные физическими ограничениями на вход и выход объекта (ЦАП и АЦП).
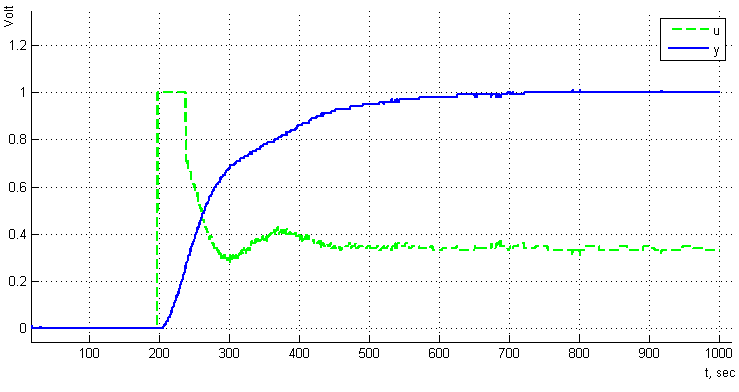
2.2. ЧАР-ПИД-2S с внешним возмущением
Алгоритм ЧАР-ПИД-2S при действующем на объект таком же возмущении f(t) успешно производит настройку регулятора; система после настройки устойчива. Соответствующие графики процесса: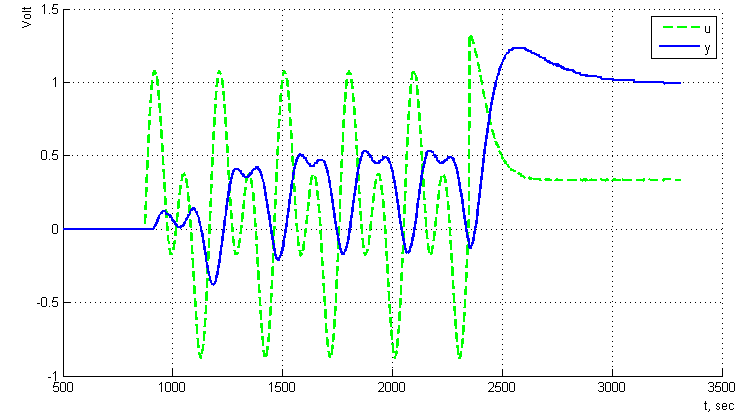
3. Выводы
Разработанный адаптивный регулятор ЧАР-ПИД-2S для промышленного контроллера Siemens S7-313C расширяет область применимости адаптивного регулятора в сторону увеличения допустимых внешних возмущений. Проведены испытания, подтвердившие его эффективность.
Литература
[1] Pfeiffer B.-M. Towards ‘plug and control’: self-tuning temperature controller for PLC // International Journal of Adaptive Control and Signal Processing. - 2000. - Vol. 14, no. 5. - P. 519-532.Приложение. Алгоритм Siemens PID Self-tuner
Алгоритм автонастройки по этапам приведен на рисунке 1.
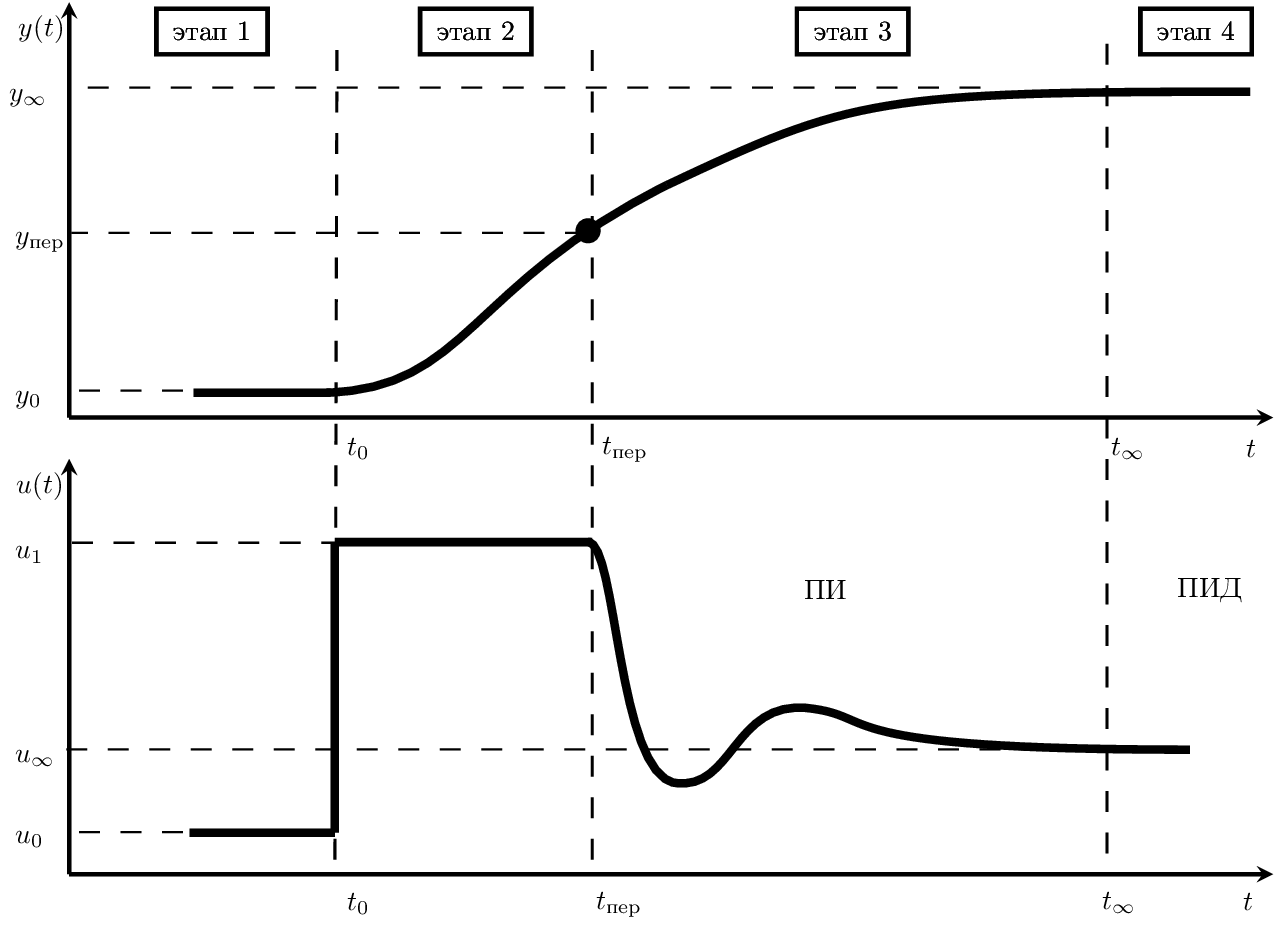
Настройка ПИД-регулятора состоит из четырёх этапов. На первом этапе управление объектом производится в ручном режиме (часто, например для тепловых процессов, объект находится в ''холодном`` состоянии).
На этапе 2 настройки, в течение которого обратная связь остаётся разомкнутой, на вход объекта поступает фиксированное значение управления.
Программа автонастройки постоянно наблюдает значение выхода объекта
 и ищет точку перегиба (
и ищет точку перегиба ( ,
,
 ,
,
 ), то есть момент, когда переходная характеристика достигает максимальной крутизны.
), то есть момент, когда переходная характеристика достигает максимальной крутизны.
Экспериментальное исследование без внешнего возмущения
Программа регулятора разрабатывается в фирменной интегрированной среде Siemens TIA Portal, позволяющей как писать программы для нижнего уровня, так и реализовывать панели оператора для верхнего уровня (SCADA). Основная часть программы -- подпрограмма прерывания, в которой выполняются все основные вычислительные действия.
Поскольку вычислительные формулы простые, нет необходимости разбивать программу на параллельные потоки.
Код программы написан на Паскале-подобном языке SCL, являющимся расширением языка ST для промышленных контроллеров стандарта IEC 1131.
Модель объекта управления взята из статьи
[1]:

Эксперименты проводятся в отсутствие внешнего возмущения.
Siemens PID Self-tuner без внешнего возмущения
Система после настройки устойчива.
ЧАР-ПИД-2S без внешнего возмущения
Настройка проходит успешно, система после настройки устойчива.