Внедрения
Настройщик ПИД-регулятора в системе управления нагрева нефтепродукта при его сливе и хранении
1. Введение
Статья относится к разгрузке высоковязких и высокозастывающих продуктов (нефтепродукты, патоки, жиры и т.д.) из емкостей для хранения и транспортирования. Для сокращения времени разгрузки емкости и обеспечения полноты слива необходимо повысить текучесть продукта.
Существуют различные способы повышения текучести продукта, среди которых растворение вязкого или застывшего продукта жидким маловязким растворителем, добавление депрессанта, снижающего температуру застывания продукта и т.д.
В России, например, наибольшее распространение для слива вязких нефтей и нефтепродуктов из цистерн получил подогрев насыщенным водяным паром, подаваемым непосредственно в нефтепродукт. Однако этот способ не только малоэффективен и вреден для окружающей среды, но и снижает коммерческое качество самих нефтепродуктов.
Известны технологии разогрева и слива продукта без смешения его с теплоносителем, основанные на разогреве продукта, отбираемого из емкости, во внешнем теплообменнике, где разогреваемый продукт не находится в непосредственном контакте с теплоносителем и возврате разогретого продукта в емкость (циркуляционный разогрев), где разогретый продукт, по замыслу, должен передать тепло холодному, плохо текучему продукту, в емкости.
2. Описание системы регулирования и настройщика
Для нагрева мазута используется способ, при котором продукт в смеси с предварительно нагретым в стартовой емкости аналогичным продуктом отбирают из донной части емкости, пропускают эту смесь через внешний теплообменник, где ее нагревают до заданной температуры, и возвращают нагретый продукт в ту же емкость по двум трубопроводам на вход в канал отбора холодного продукта из донной части:
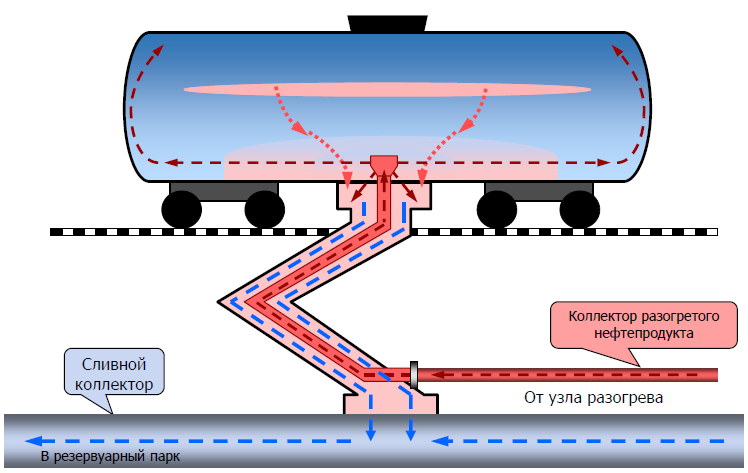
Рис. 1. Схема отбора мазута из цистерны
Для регулирования
температуры мазута на выходе из
теплообменника используется ПИД-регулятор,
управляющий заслонкой теплообменника.
Передаточная функция регулятора имеет
вид
где  – коэффициенты регулятора,
s –
комплексная переменная Лапласа.
– коэффициенты регулятора,
s –
комплексная переменная Лапласа.
Проблема состоит в выборе коэффициенты ПИД-регулятора так, чтобы система регулирования обладала устойчивостью и приемлемым быстродействием.
Сложность задачи в частности состоит в том, что объект регулирования обладает нелинейностями, и стандартные алгоритмы и основанные на них программы [2] в данном случае не срабатывают.
3. Результаты внедрения
Для решения задачи был разработан программный блок-настройщик ПИД-регулятора для контроллера Siemens, осуществляющий идентификацию объекта управления в замкнутом контуре регулирования и вычисляющий рекомендуемые коэффициенты ПИД-регулятора в стандартной форме (программный блок CONT_>C) для данного конкретного процесса.
Алгоритм настройки использует идентификационный подход в адаптивном управлении; при этом для определения модели объекта используется метод конечно-частотной идентификации [1], а для синтеза параметров ПИД-регулятора – метод внутренней модели [3]. При идентификации на замкнутую систему подаётся испытательный сигнал, состоящий из суммы двух синусоид.
Ниже на рис. 2 показан типичный процесс регулирования до настройки системы, на рис. 3 – процессы регулирования после подключения рекомендованных коэффициентов регулятора. Таким образом, во многих случаях удалось улучшить процессы регулирования, избавиться от автоколебаний в системе, повысить точность регулирования.
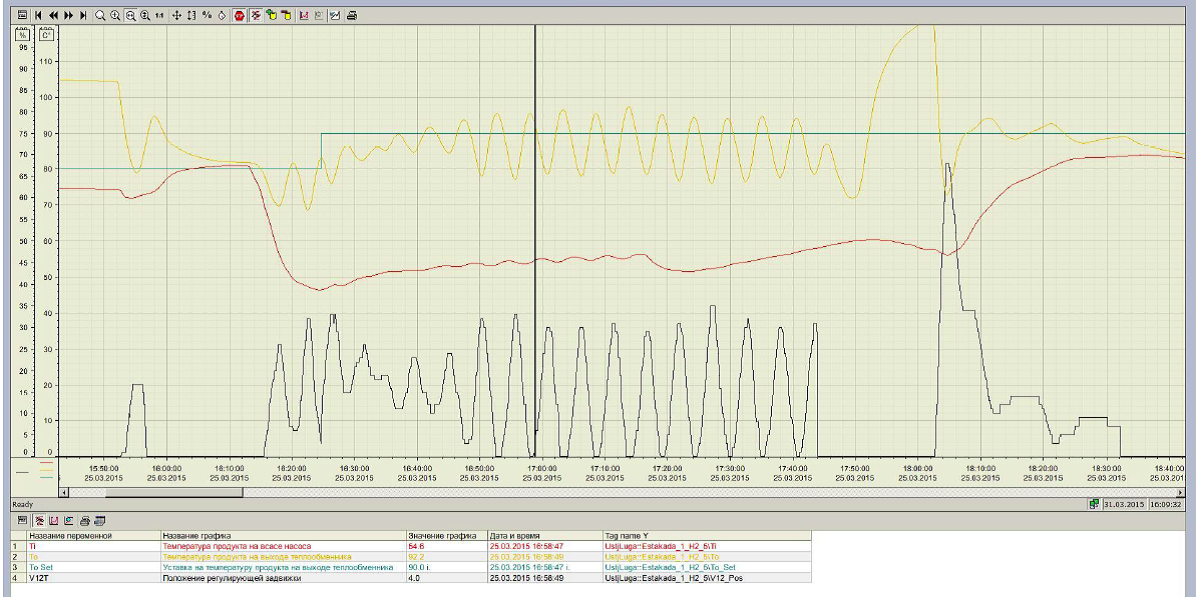
Рис. 2. Процессы регулирования температурой нефтепродукта до настройки системы.
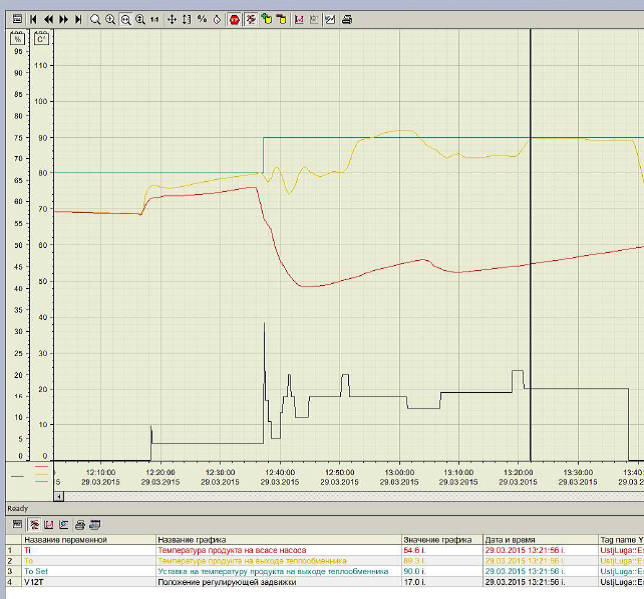
Рис. 3. Процессы регулирования в системе после настройки регулятора
Литература
АЛЕКСАНДРОВ А. Г. Частотное адаптивное управление устойчивым объектом при неизвестном ограниченном возмущении // АиТ. — 2000. — No 4. — С. 106–116. (скачать)
PFEIFFER BERND-MARKUS. Towards ‘plug and control’: self-tuning temperature controller for PLC // International Journal of Adaptive Control and Signal Processing. –– 2000. –– Vol. 14, no. 5. –– P. 519–532.
VISIOLI A. Improving the load disturbance rejection perfomance of IMC-tuned PID Controllers // 15th Triennial World Congress, Barcelona, Spain. –– IFAC, 2002
Управление давлением жидкости в бурильной установке
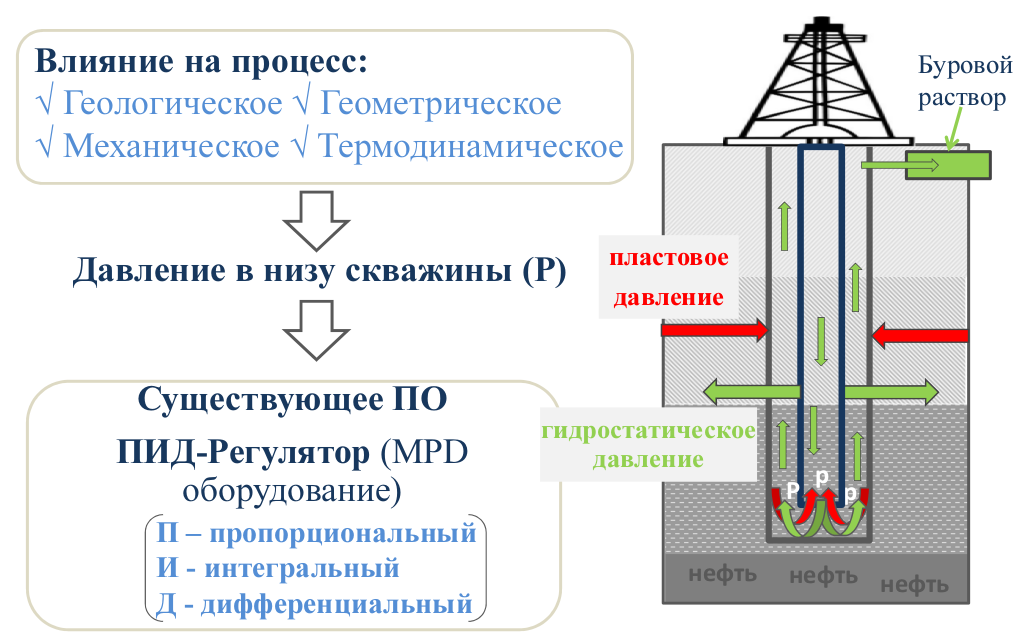
Адаплаб СН-ПИД в процессе бурения предназначен для промышленных контроллеров в буровом оборудований MPD (Managed Pressure Drilling), где он контролирует два дросселя, а с этим и забойное давление в низу скважины.
Перед процессом бурения скважины с оборудованием MPD на месте делается процесс, который называют "Fingerprinting" (снятие отпечатков). Это процесс, в котором определяют начальную настройку параметров ПИД регулятора под конкретную динамику конкретной скважины (различные давления).
После того, как это сделано (занимает около половины дня или полный день, в зависимости от динамики конкретной скважины) процесс бурения может начаться.
Дальше, как утверждают наши эксперты, не смотря на предварительное "снятие отпечатков", в процессе бурения корректировки параметров настройки ПИД- регулятора все еще имеют место, так как происходит увеличение скважины или другие аномалии, которые могут потребовать более быструю реакцию или гашение ПИД- регулятора. В основном это означает, что, не смотря на предварительное "снятие отпечатков" (предварительную ПИД настройку), дополнительные настройки параметров ПИД регулятора по-прежнему необходимы в процессе бурения.


Пресс ДО138Б

Пресс гидравлический для синтеза сверхтвердых материалов, г. Троицк.
Предназначен для производства синтетических алмазных порошков: гексанита, эльбора, композита и других сверхтвердых материалов методом одновременного воздействия высокого давления и высокой температуры.
Описанный процесс синтеза сверхтвердых материалов реализован на прессе ДО138Б, в котором с помощью гидравлического пресса создается давление 6300кПа. Нагрев осуществляется с помощью тиристорного преобразователя, который питается от трехфазной сети 380 В, путем подачи управляющего напряжения Uc(t). Датчик Холла с измерительным преобразователем ДХ1 выдает напряжение Ui(t). Для измерения напряжения используется шунтирующее сопротивление Rш, позволяющее получить ток iu(t), пропорциональный напряжению в цепи образца u(t). Датчик Холла с измерительным преобразователем ДХ2 выдает напряжение U(t), пропорциональное действующему значению напряжения в цепи нагрева образца и так же осуществляет гальваническую развязку. Пройдя оцифровку и калибровку в электронно-вычислительной машине (ЭВМ) формируются информационные сигналы I(kh) и U(kh), соответствующие действующему значению тока и напряжения в цепи нагрева образца и выбранные с интервалом дискретности h. Текущая активная мощность на образце P(kh) вычисляется программно, перемножением текущего действующего значения тока I(kh) и текущего действующего значения напряжения U(kh). Сигнал P*(kh) задает требуемое значение активной мощности, которое необходимо поддерживать на образце и изменяется согласно заданной циклограмме. Регулятор обеспечивает изменение мощности согласно заданной циклограмме. В прессе используется ПИД-регулятор.
Процесс регулирования осложняется тем, что для образцов из различных материалов изменяются динамические характеристики процесса нагрева. В результате чего требуется настройка параметров регулятора под каждый тип образцов, для того, чтобы обеспечить требуемое качество отработки циклограммы.
На основе предложенного алгоритма был разработан адаптивный ПИД-регулятор, который прошел испытания на прессе. Процесс адаптации выполнялся в два этапа. На первом этапе были получены данные с пресса: подавались различные значения управляющего напряжения, в результате чего мощность устанавливалась на различных уровнях. По этим данным была вычислена постоянная времени T = 0.2сек и запаздывание τ =0.12сек. Сравнение графика реальных данных (график 1) и графика полученной модели (график 2) приведено на рисунке:

Для проведения процесса синтеза сверхтвердого материала была задана тестовая циклограмма. Из этой циклограммы было получено номинальное значение мощности P = 1500 Вт. Следовательно, была выполнена линеаризация модели нагревателя для P = 1500Вт, откуда было получено kp = 888.98.
Синтез ПИД-регулятора был выполнен по методу внутренней модели при Kp = 888.98, T = 0.2сек и τ = 0.12сек. Результаты работы системы с рассчитанным регулятором приведены на рисунке:
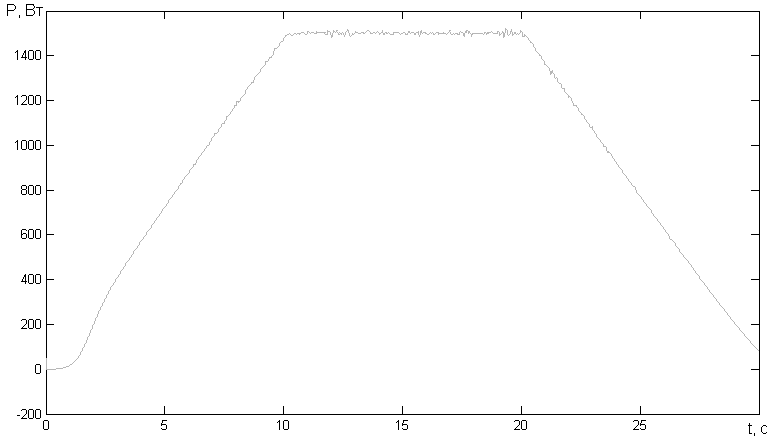
Из рис. 5 видно, что реальная мощность повторяет заданную циклограмму, а разброс регулируемой величины не превышает 1.3%.
Публикации
- Александров А. Г. Частотная адаптивная система управления. Патент на изобретение № 2413270, Опубликовано: 27.02.2011 (скачать)
- Александров А.Г. , Д.Г.Кариков ЧАСТОТНЫЙ АДАПТИВНЫЙ РЕГУЛЯТОР ЧАР-21. Труды международной конференции "ИДЕНТИФИКАЦИЯ СИСТЕМ И ЗАДАЧИ УПРАВЛЕНИЯ",Москва,2006,ИПУ,CD-ROM,ISBN 5-201-14984-7,стр. 2361-2381. (скачать)
- Александров А.Г. , Д.Г.Кариков, Курицина Е.Ю. Частотный адаптивный регулятор с заданным интервалом дискретности. Труды международной конференции ИДЕНТИФИКАЦИЯ СИСТЕМ И ЗАДАЧИ УПРАВЛЕНИЯ",Москва,2007,ИПУ.CD-ROM,ISBN 5-201-14992-8,стр.655-668. (скачать)
- Аlexandrov A.G., D.Khomutov Frequency adaptive controller: experimental investigation Proceedings of the Tenth IASTED International Conference May 26-28, 2008 Quebec City, Quebec, Canada, ISBN 978-0-88986-746-8.pp. 96-101. (скачать)
- Александров А.Г. , Д.Г.Кариков , Д.А.Хомутов. Частотный адаптивный регулятор . Технические и программные средства систем управления, контроля и измерения, УКИ'08, Материалы Российской конференции с международным участием, Москва 2008. Труды, Москва, 2008, стр. 88-89. (скачать)
Экспериментальный стенд
Испытания регулятора проводились на стенде
полунатурных испытаний, который имитирует промышленную среду. На
стенде размещены промышленный контроллер WinCon-8000,
в котором функционирует самонастраивающийся регулятор ЧАР-25, и
промышленный компьютер Athen, на котором
функционирует программа имитирующая объект управления. Связь между
контроллером WinCon и компьютером Athena
чисто электрическая, посредством встроенных в них ЦАП и АЦП. Схема
стенда приведена на рис.2.
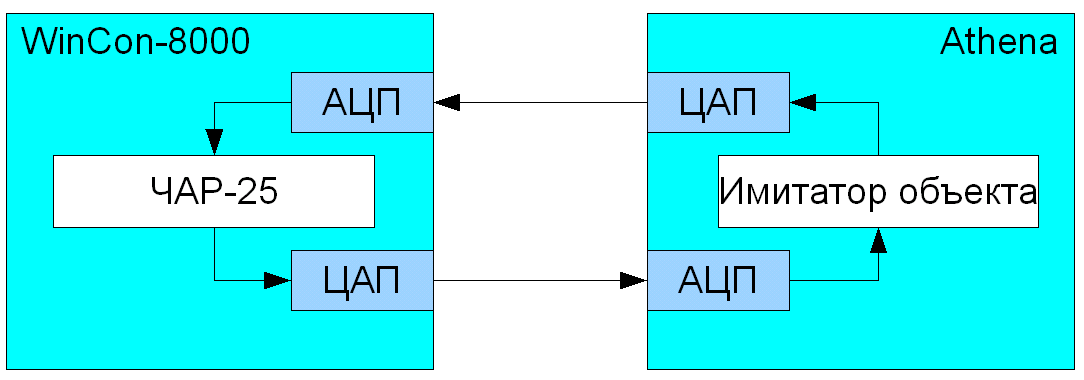
Рис. 2. Схема стенда
Результаты экспериментальных исследований регулятора ЧАР-25
На промышленном компьютере Athena имитируется объект вида
 . На рисунке 3 представлен график регулируемой переменной при адаптации.
. На рисунке 3 представлен график регулируемой переменной при адаптации.
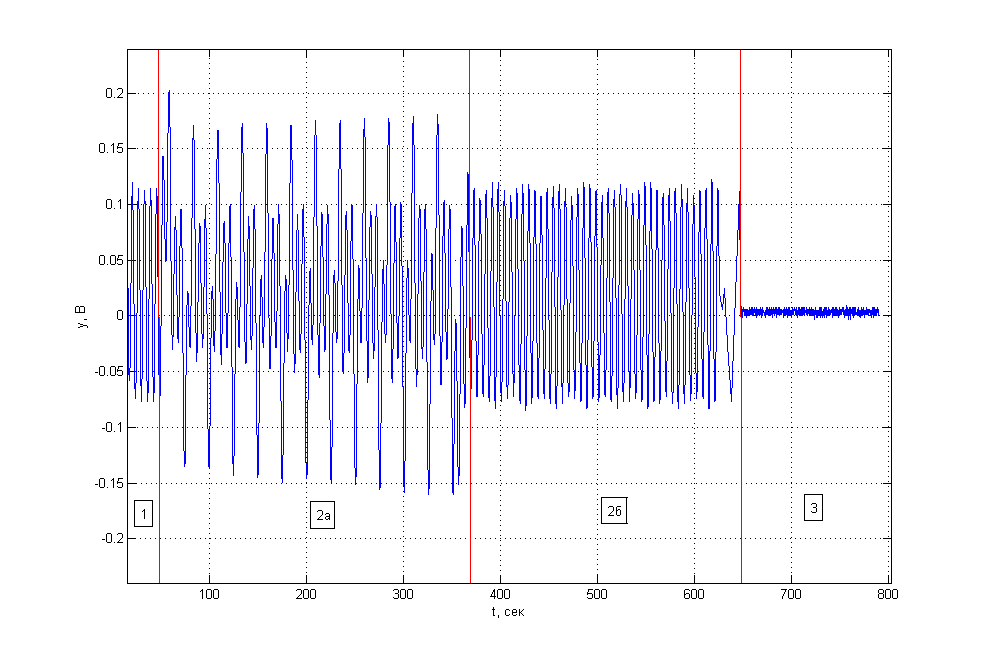
Рис. 3. График регулируемой переменной при самонастройке
- 1 – на объект действует внешнее возмущение, испытательный сигнал отсутствует;
- 2а – этап самонастройки испытательного сигнала;
- 2б – этап идентификации объекта с помощью испытательного сигнала, расчет регулятора;
- 3 – выход объекта в системе, замкнутой найденным регулятором.
1 – 2а – этап самонастройки испытательного сигнала; 2б – этап идентификации объекта с помощью испытательного сигнала, расчет регулятора; 3 – выход объекта в системе, замкнутой найденным регулятором.
Из данного графика можно заключить, что включение регулятора ЧАР-25 позволило добиться требуемого подавления внешнего возмущения.
Публикации
- Резков И. Г. Адаптивный регулятор для многорежимного объекта // ж. "Автоматика и телемеханика", №5, 2013, стр. 35 - 58. (скачать)
- Александров А. Г. Частотная адаптивная система управления. Патент на изобретение № 2413270, Опубликовано: 27.02.2011 (скачать)
- Александров А.Г. , Д.Г.Кариков ЧАСТОТНЫЙ АДАПТИВНЫЙ РЕГУЛЯТОР ЧАР-21. Труды международной конференции "ИДЕНТИФИКАЦИЯ СИСТЕМ И ЗАДАЧИ УПРАВЛЕНИЯ",Москва,2006,ИПУ,CD-ROM,ISBN 5-201-14984-7,стр. 2361-2381. (скачать)
- Александров А.Г. , Д.Г.Кариков, Курицина Е.Ю. Частотный адаптивный регулятор с заданным интервалом дискретности. Труды международной конференции ИДЕНТИФИКАЦИЯ СИСТЕМ И ЗАДАЧИ УПРАВЛЕНИЯ",Москва,2007,ИПУ.CD-ROM,ISBN 5-201-14992-8,стр.655-668. (скачать)
- Аlexandrov A.G., D.Khomutov Frequency adaptive controller: experimental investigation Proceedings of the Tenth IASTED International Conference May 26-28, 2008 Quebec City, Quebec, Canada, ISBN 978-0-88986-746-8.pp. 96-101. (скачать)
- Александров А.Г. , Д.Г.Кариков , Д.А.Хомутов. Частотный адаптивный регулятор . Технические и программные средства систем управления, контроля и измерения, УКИ'08, Материалы Российской конференции с международным участием, Москва 2008. Труды, Москва, 2008, стр. 88-89. (скачать)
Результаты экспериментальных исследований регулятора СН-ПИД-1
Испытания регулятора проводились на стенде полунатурных испытаний, который имитирует промышленную среду. На стенде размещены промышленный контроллер WinCon-8000, в котором функционирует самонастраивающийся регулятор СН-ПИД-1, и так же промышленный компьютер Athena, на котором функционирует программа имитирующая объект управления. Связь между контроллером WinCon и компьютером Athena электрическая, посредством встроенных в них ЦАП и АЦП. Схема стенда приведена на рис.2.
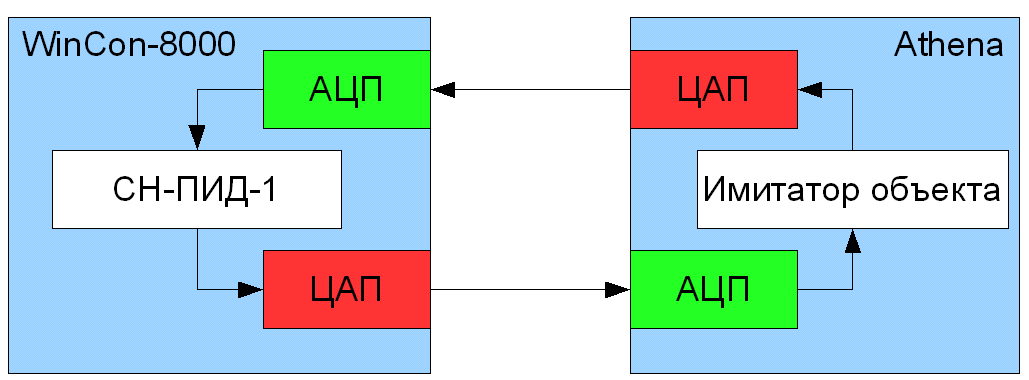
Рис. 2. Схема стенда
Результаты экспериментальных исследований
На промышленном компьютере Athena имитируется объект вида W(s) = K e-τs / (Tsog + 1), коэффициенты которого изменяются согласно таблице 1, через промежутки времени 3500 сек. На объект управления действует внешнее возмущение, представляющее собой сумму меандра с частотой 0.1 рад/c и амплитудой 1 и белого шума: f(t) = SIGN( SIN(0.1t) ) + RAND. Амплитуда испытательного сигнала самонастраивается таким образом, чтобы вносимое отклонение не превышало 15% от истинного.
|
Номер режима |
I |
II |
III |
IV |
|
K |
6.14 |
4.77 |
3.75 |
1.78 |
|
T, сек |
7.68 |
2.49 |
4.61 |
9.00 |
|
τ, сек |
0.35 |
0.33 |
1.54 |
1.06 |
График регулируемой переменной приведен на рис.3, увеличенный график на четвертом режиме приведен на рис. 4.
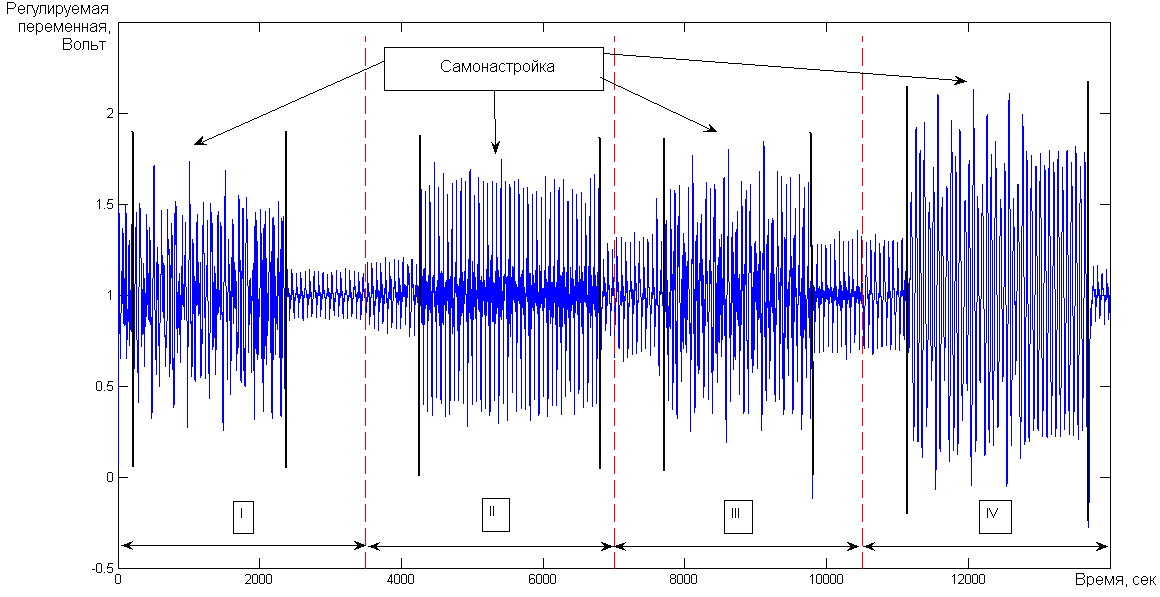
Рис. 3. График регулируемой переменной при самонастройке
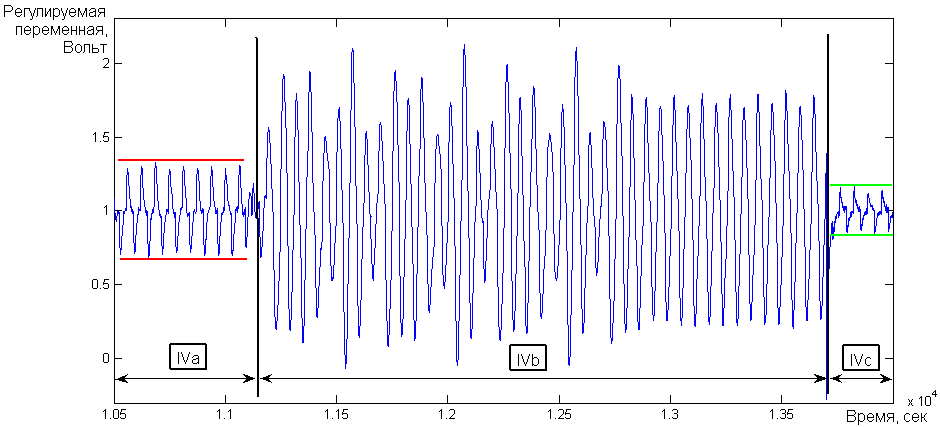
Рис. 4. График регулируемой переменной на втором режиме
Для пояснения рассмотрим рис. 4. На интервале IVa объект управляется ПИД-регулятором самонастроенным на объект третьего режима. На интервале IVb проводится самонастройка ПИД-регулятора. На интервале IVc объект регулируется ПИД-регулятором самонастроенным на объект четвертого режима.
В случае если система функционирует с ПИД-регулятором, настроенным на объект первого режима, и самонастройка регулятора отключена, то система потеряет устойчивость на третьем режиме. График регулируемой переменной при отключенной самонастройке приведен на рис. 5.
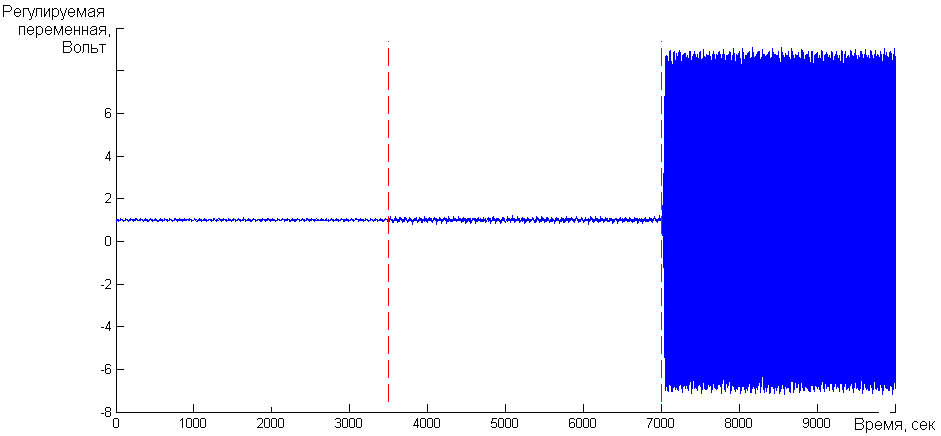
Рис. 5. График регулируемой переменной при отключенной самонастройке
Таким образом регулятор СН-ПИД-1 обеспечивает устойчивую работу системы при незначительном отклонении вносимом испытательным сигналом, который подается только в период адаптации.